Active Electrosense
Few effective technologies exist for sensing in dark or murky underwater
situations. For this reason, we have been exploring the use of a novel biologically-inspired approach to non-visual
sensing based on the detection of perturbations to a self generated electric field. This is used by many species
of neotropical nocturnal freshwater fish. This approach, termed active electrosense, provides unique capabilities
for sensing of nearby objects.
Northwestern University has pioneered developing electronic equivalents to active electrosense. Together with Fred Boyer's group, we organized the First International Workshop on Robotic Electrosense in 2012.
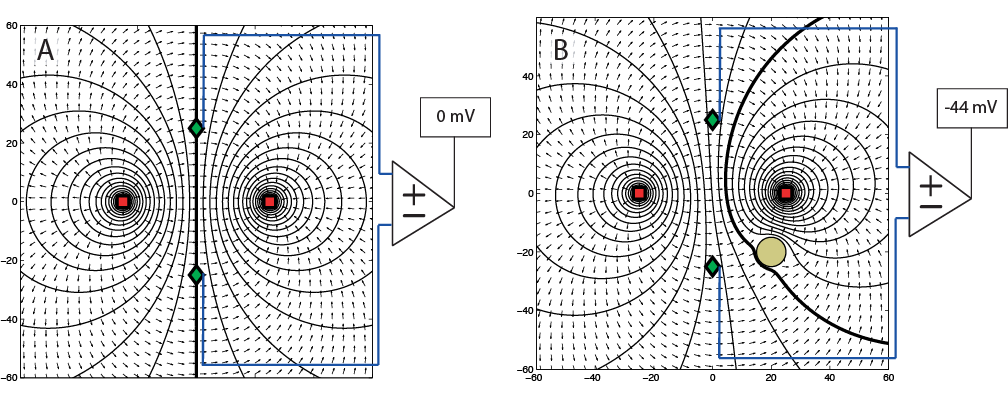
This image provides an example of how this sensory mechanism works.
In A, two electrodes (red) are set to emit a bi-phasic oscillating signal. Another two electrodes (green) are
positioned orthogonal to the original pair and all electrodes are equidistant from a center point.
When the green electrodes are measured differentially in an open space with no objects present, a voltage
perturbation of 0 is measured. In B, when we add an object whose conductivity differs from the surrounding
fluid, the field is perturbed so that we are able to measure a change in voltage. This system creates the
basic unit we use for active electrosense where changes in the conductivity of the environment can be sensed
The video below demonstrates what happens to the field and electrode measurements as an object flies by an insulating pod.
Exploration
An intutive use for our active electrosensing robot is to explore unknown underwater environments. There are plenty of techniques developed for vision and sonar, however our induced voltage pertubations does not fit either of these categories. Rather than abstracting and correlating the voltage pertubation with specific objects (see Statistical Object Identification) we stay exclusively in the voltage domain. The assumption is that every object will have a particular voltage profile; and thus searching for the areas that are unqiue in each profile will help us localize objects more easily. The question that we ask is how do we optimally maximize our time in the regions that will yield more salient information given that we don't know where our objects are ahead of time. We use Bayesian filters, Fisher information as well as ergodicity to try to answer our question.
Obstacle Avoidance
Simple reactive control algorithms can be applied to the sensorPod to navigate through cluttered underwater environment. Shown below is a point of vision (POV) shot of the sensorPod navigating through a simulated cluttered environment using electrosense. The sensorPod moves autonomously with a single goal to traverse the tank from one end to the other. The VU meter on the side shows the electric signals on the left and right-hand sides of the sensorPod. The sensorPod tries to balance the electric signals on two sides to avoid obstacles.
People
- Ugurcan Mugan, PhD student
- Chen Chen
- Yang Bai
- Yonatan Silverman
- James Snyder
- James Solberg
- Sandra Fang
Collaborators
- Michael Peshkin, Dept. of Mechanical Engineering, Northwestern Universtiy
- Kevin M. Lynch, Dept. of Mechanical Engineering, Northwestern Universtiy
- Joshua R. Smith, Dept. of Electrical & Engineering, University of Washington
- HDT Global
Related Publications
Human-in-the-loop active electrosense
Sandra Fang, Michael Peshkin, Malcolm A. MacIver
Bioinspiration & Biomimetics, 2016 (Article)
Enhanced detection performance in electrosense through capacitive sensing
Yang Bai, Izaak D. Neveln, Michael Peshkin, Malcolm A. MacIver
Bioinspiration & Biomimetics, 2016 (Article)
Finding and identifying simple objects underwater with active electrosense
Yang Bai, James B. Snyder, Michael Peshkin, Malcolm A. MacIver
The International Journal of Robotics Research, 2015 (Article)
Improving Object Tracking through Distributed Exploration of an Information Map
Izaak D. Neveln, Lauren M. Miller, Malcolm A. MacIver, Todd D. Murphey
IEEE International Conference on Intelligent Robots and Systems (IROS), 2014 (Article)
Biomimetic and bio-inspired robotics in electric fish research
Izaak D. Neveln, Yang Bai, … , Malcolm A. MacIver
Journal of Experimental Biology, 2013 (Article)
Optimal Planning for Information Acquisition
Yonatan Silverman, Lauren M. Miller, Malcolm A. MacIver, Todd D. Murphey
Intelligent Robots and Systems (IROS), Tokyo JP, 2013 (Article)
Sensing Capacitance of Underwater Objects in Bio-inspired Electrosense
Yang Bai, James B. Snyder, Yonatan Silverman, Michael Peshkin, Malcolm A. MacIver
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012 (Article)
Underwater object tracking using electrical impedance tomography
James B. Snyder, Yonatan Silverman, Yang Bai, Malcolm A. MacIver
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012 (Article)
Location and Orientation Estimation with an Electrosensing Robot
Yonatan Silverman, Yang Bai, James B. Snyder, Malcolm A. MacIver
IEEE Int. Conf. on Intelligent Robots and Systems (IROS), 2012 (Article)
Active electrolocation for underwater target localization
James R. Solberg, Kevin M. Lynch, Malcolm A. MacIver
The International Journal of Robotics Research, 2008 (Article)
Robotic electrolocation: Active underwater target localization with electric fields
James R. Solberg, Kevin M. Lynch, Malcolm A. MacIver
IEEE International Conference on Robotics and Automation, 2007 (Article)
Sensory acquisition in active sensing systems
Mark E. Nelson, Malcolm A. MacIver
Journal of Comparative Physiology A, 2006 (Article)
Towards a biorobotic electrosensory system
Malcolm A. MacIver, Mark E. Nelson
Autonomous Robots, 2001 (Article)